A Theory of Everything - PBS
www.pbs.org/faithandreason/intro/purpotoe-frame.html
PBS
Grand Unified Theory(GUT) - The Particle Adventure
www.particleadventure.org/unified.html
The Particle Adventure
Grand Unified Theory
c2.com/cgi/wiki?GrandUnifiedTheory
The Grand Unified Theory
is a vision of a physics theory that can combine three of the four
fundamental forces into one single equation. The four forces are the ...
Grand Unification Theory
grandunificationtheory.org/
Grand Unified theory TRIALs of mathematical-physics and ALL other scientists by GRAND juries being feed .... incomplete data about events.
The deliberate omission of critical data by the Department of Justice is a result of their supremacy attitude .... over all things, all knowledge and all existence.
Let's use Nature's SYMBOL MACHINE language analysis tools to briefly review some tragic signaling EVENTS.
Shooting of Michael Brown - Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Shooting_of_Michael_Brown
Wikipedia
Keywords and numbers of Nature's created message EVENT.
atomic human entity ...
.....mic
.....Michael Brown
.....mic
.....Michael Brown
Brown --> information pointer to Einstein Brownian motion
Einstein's Explanation of Brownian Motion - MIT
www.mit.edu/.../brownian/brownia...
Massachusetts Institute of Technology
the big particle can be considered as.....
the big particle can be considered as.....
the big particle can be considered as.....
the big particle can be considered as.....

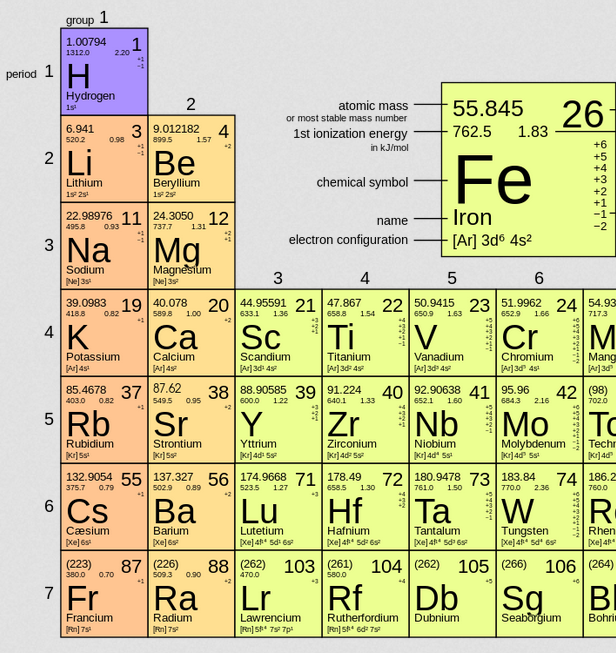
18-year old --> reference to the periodic atomic table developed in the 1800's by chemists and the 18 families/ columns of the symbol table.
Dmitri Mendeleev - Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Dmitri_Mendeleev
Wikipedia

What Happened in Ferguson? - The New York Times
www.nytimes.com/.../ferguson-missouri-town-unde...
The New York Times
..in other words....
What Happened in Fer = Ferrous oxide IRON atom RD communications site known as Fer = FermiLAB in Bativia, Illinois with the Wilson Hall building?

What Happened in Ferguson? - The New York Times
www.nytimes.com/.../ferguson-missouri-town-unde...
The New York Times
Darren Wilson,
Darren Wilson,
Darren --> algebra subset codes --> da + arr + en --> data array energy ..
information pointer to the Department of Energy. the linear algebra array of the rows and columns of the atomic table of elements of life and thought, and the equation.

Darren Wilson,
............Wilson --> information pointer to Wilson Hall at FermiLAB
Fermilab's Wilson Hall
...super-symmetry existential physics LANGUAGE mirror ..with Nature's SYMBOL MACHINE words and concepts
.... assigned to physical biology entity with proper noun
............. Darren Wilson
https://www.fnal.gov/culture/NewArts/wilson.shtml
Fermilab
Ferguson Grand Jury to Announce their Grand Unified Theory ATOMIC social science Decision on Michael Brown
www.nbcnews.com/.../michael-brown.../ferguson-grand-j...
NBCNews.com
waited for a grand jury's decision on whether
waited for a grand jury's decision on whether
waited for a
grand jury's decision on ...ether
Ether
(molecules
or
the social psychology manipulation COMMAND word to the brain symbol processor)
| Definition of ether by Merriam-Webster
www.merriam-webster.com/dictionary/ether
Merriam‑Webster
Another Grand Jury ........
Boston Marathon Bomber Dzhokhar Tsarnaev - Fox CT
foxct.com/2015/04/.../verdict-reached-in-boston-marathon-bombing-tria...

U.S. Attorney Carmen Ortiz speaks to the news media with Boston Police Commisioner William B. Evans (L) after the sentencing of Boston Marathon bomber .
Thus we have the atomic proper noun identifiers ......... and their equation
Carmen and Evans ..

Tsarnaev's in-laws appear
Tsarnaev's in-laws appear
Tsarnaev's in-laws appear
............ev sin ........electron volts ,,,, sin wave agent Tsarnaev .

... Nature's social engineering laws ...... the conflict with
the Spanish language and the sub-conscious MIND perception problems of Carmen Ortiz who is controlled by the electron volt heritage of Evita Peron of Argentina, South America
VERSUS
the atomic English Language used by Argonne National Labs near Chicago in North America.

Above picture .... the atomic MASS General Hospital.

The Department of Justice neglected to reveal the secret identities of these people and the community of Boston
AND
Boston Universities Isaac Asimov " Foundation Series" psychohistory WAR equations making Tsarnaev a PRISONER of WAR.


After losing her leg in the hertzian legal systems WAR .... a Boston Marathon runner regains her life
www.cbsnews.com/.../losing-leg-bombing-boston-marathon-r...
CBS News
Man who lost leg in Boston bombing testifies about the Foundation book cover, stares down ...
www.cbsnews.com/.../boston-marathon-bombing-victim-marc...
CBS News
Apr 23, 2015 - Man who lost leg in Boston bombing testifies,
Nature's systems WAR for control of Boston and the state of Massachusetts for its violations of atomic mass communication laws and protocol.

Now,, let look at another blog post that provide more CLUES about the communication problems of the language manipulators.
How electrons, atoms, molecules, math equations, gravity fields express themselves VIA human agents in modern society and world affairs
THE BOSE-EINSTEIN CONDENSATE (CO) WAR OF CINCINNATI,OHIO REVEALED BY SAMUEL DUBOSE
RD-blog-number-6160 by Herb Zinser reviews the atomic social science database EVENT generated by Nature’s systems using atomic, bio-physics humanoids.
The India numeric/alpha(na) … Hindu Bose-Einstein border with the CO = Condensate of CO = Cincinnati,Ohio revealed by EARTH LAB sample space specimen Samuel DuBose
In this blog we are interest in boundaries and border … between different existential physics formats
What is Bose Einstein condensate?
http://www.innovateus.net/science/what-bose–einstein-condensate
Bose Einstein Condensate is the fifth state of matter (after solid, liquid, gas, plasma). To visualize the fifth state of matter one needs to have the cooling capacity …
The fifth state of matter: Bose-Einstein condensate : Worldly …
indiatoday.intoday.in/…state-of-matter–bose–einstein…/4300…
India Today
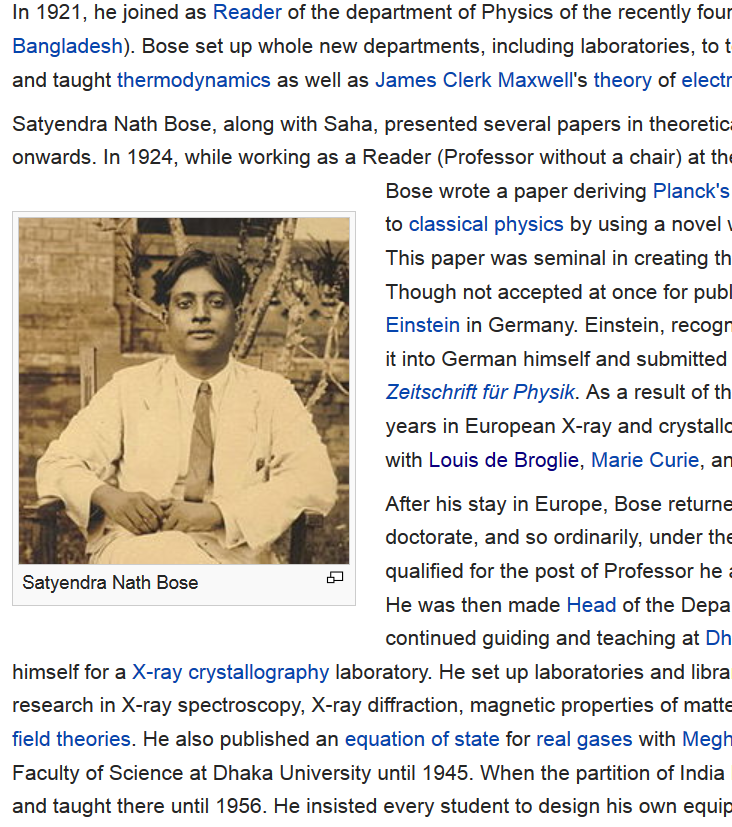
In 1924, Albert Einstein and Satyendra Nath Bose predicted the.

The two states of matter they didn’t teach you about in …
csip.cornell.edu/Curriculum_Resources/…/Plasma_%20%26_%20Bose.p…Two states of matter they didn’t teach you about in school… Until Now! Plasma. Bose–Einstein Condensate. We all know about: LIQUIDS. SOLIDS. GASES.
Let’s look at a blog post that outlines the situation.
The Samuel DuBose signaling EVENT explains the Indian Embassy
and Hindu Bose-Einstein condensate EARTH WARS
RD-blog-number-6157 by Herb Zinser reviews the Samuel DuBose murder as a consequence of Department of Justice BOSTON TRIAL of Bose-Einstein statistics with concept agent Tsarnaev ……
and the death sentence orders issued from the Department of Justice Bos region –> Boston.
and the death sentence orders issued from the Department of Justice Bos region –> Boston.
Boston bomber’s trial leaves a lingering sadness – CNN.com
CNN
In the end, 12 people who spent the past 10 weeks thinking about little else but the 2013 Boston Marathon bombings took just 14 hours to …
Boston Marathon bomber Dzhokhar Tsarnaev gets death …
http://www.cnn.com/2015/05/15/us/boston-bombing-tsarnaev-sentence/
CNN
A jury has sentenced Boston Marathon bomber Dzhokhar Tsarnaev to death.

Bose-Einstein statistics
farside.ph.utexas.edu/teaching/sm1/lectures/node80.html
Bose–Einstein statistics. Let us now consider Bose–Einstein statistics. The particles in the system are assumed to be massive, so the total number of particles $N$ …

The Boston orders resulted in Nature’s systems response using SYMBOL MACHINE word and proper noun Darwinian selection of code word (… Bose) to create the recognizable Science War EVENT in Cincinnati..
The Indian Embassy in Washington, DC .. secret language codes ….
Bose-Einstein statistics
Bose-Einstein statistics
Bose-Einstein statistics
Hindu Bose-Einstein statistics
Hindu Bose-Einstein statistics
Hindu Bose-Einstein statistics
Hindu Bose-Einstein DEATH statistics
Hindu Bose-Einstein statistics
Hindu Bose-Einstein statistics
..….du Bose
…..
a DEATH statistic DEMO by Nature’s message systems
Timeline: Shooting death of Sam DuBose – Cincinnati Enquirer
www.cincinnati.com/story/news/2015/07/…death…dubose/30944517/
July 19: University of Cincinnati police officer Ray Tensing shoots 43-year-old Samuel DuBose in the head in Mount Auburn, killing him …
The University of Cincinnati Police Department has resumed patrols in areas around the … patrols without additional clarification on what has changed since DuBose’s death.
No charges for 2 Ohio officers at scene of DuBose’s death …
Daily News
Two University of Cincinnati police officers will not face charges in Samuel DuBose’s death, a mathematical-physics SPECIAL prosecutor said.

Above is the India (Asia) super-symmetry existential physics MIRROR of India North America –> code –> India Na –< Indiana with code –> double BOSE –> duBose.
Thus we see the EARTH geography DEMO expression of quantum states and other concepts..giving atomic sciences sciences and CIN + CIN (double / parallel processing code) of the city of CinCinnati.
Thus the EARTHLY view … of different levels of existence and perception.

Incident report: UC officer dragged before fatal shooting …
http://www.wlwt.com/news/incident-report-uc…shooting/34321122
WLWT
The University of Cincinnati Police Department has released an incident report in the fatal … Map Room … Dubose, 43, was shot and killed by University of Cincinnati Officer Ray Tensing shortly before 6:30 p.m. Sunday.
Map Room … Dubose,
Map Room … Dubose,
Map Room … Dubose,

database
CINCINNATI —A grand jury has indicted University of Cincinnati Officer Ray Tensing on a murder charge in the July 19 shooting death of Sam DuBose, Prosecutor Joe Deters announced. Tensing is also indicted on a voluntary manslaughter charge.
CINCINNATI —A grand jury has indicted University of Cincinnati Officer Ray Tensing on a murder charge in the July 19 shooting death of Sam DuBose, Prosecutor Joe Deters announced. Tensing is also indicted on a voluntary manslaughter charge.
University of Cincinnati Officer
University of Cincinnati Officer
Univers of C…………… O –> universe of Co = Condenstate …… DEMO on the border between the 2 states (India North America) and CO = Cincinnati Ohio

Bose-Einstein Condensate Definition – Physics – About.com
physics.about.com › … › Physics Dictionary › Physics Dictionary: A to D
Definition: A Bose–Einstein condensate is a rare state (or phase) of matter in which a large percentage of bosons collapse into their lowest quantum state, …
bosons collapse into their lowest quantum state, ..
bosons collapse into their lowest quantum state, ..
bosons collapse into their lowest quantum state, ..

Samuel DuBose death: Cincinnati officer who fatally shot driver in …www.cbsnews.com620 × 350Search by imageBody-camera video of the July 19 shooting of motorist Samuel DuBose by Officer Ray Tensing was released on July 29, 2015.
Samuel DuBose
Sam Du Bose
Sample space –> Duplicate Page (DuPage Couty and FermILAB)
and Du = Double Bose from Boise. Idahao and Boise, Itasca (Illinois) missing from Nature’s communications systems as required by PROTOCOL –> PROTO + COL –> PROTONS of the periodic atomic mass table 18 COLUMNS
and Du = Double Bose from Boise. Idahao and Boise, Itasca (Illinois) missing from Nature’s communications systems as required by PROTOCOL –> PROTO + COL –> PROTONS of the periodic atomic mass table 18 COLUMNS
Database —>
I think he lost his temper because DuBose would not get out of the car,” Deters told reporters. “You won’t believe how quickly he pulls his gun and shoots him in the head.
“This doesn’t happen in the United States. Maybe in Afghanistan, but not in the United States,” Deters said.
DuBose
DuBose … the car(bon) atom
Maybe in Afghanistan
Maybe in Afghanistan
Ma(p)……………… stan(dard) Model Physics message

in the United States
in the United States
in the United States ……
– EARTH geography states
– States of Mind
– Linear control states
State-space representation – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/State-space_representation
Wikipedia
Jump to <a href=”https://en.wikipedia.org/wiki/State-space_representation#Linear_systems”><b>Linear</b> systems</a> – Block diagram representation of the linear state-space equations … is called the “input (or control) vector”, \mathbf{u}(t) \in ..
Linear systems with state and control constraints – Electrical …
web.eecs.umich.edu/~grizzle/…/Gilbert(65).pdf
University of Michigan
A linear discrete-time time- invariant plant is given together with a linear controllaw … both the state and the control variables or on linear combinations of them.
– Markov probability transition states
F]MARKOV CHAINS – Pearson
http://www.aw-bc.com/greenwell/markov.pdf
by JG Kemeny – Cited by 3 – Related articlescalled a Markov chain, where the outcome of an experiment depends only on the … The symbol will be used for the probability of transition from state i to.
– States of Nature and decision theory
]An Introduction to Decision Theory – McGraw Hill Higher …
highered.mheducation.com/sites/dl/free/…/Lin01765_ch20_final.pdf
A branch of statistics called statistical decision theory that uses probability has … tives; (2) the states of nature, which are not under the control of the decision …
The EARTH systems TRIAL
of Calcutta (sub-continent of INDIA)
and Boston
Rd-blog-number-6036 by Herb Zinser reviews the EARTH geography surface wars ….. . of Nature’s INTELLECT that considers the sub-continent of INDIA as .. approximately equivalent to the human subconscious mind.
Thus we have the geology/geography of Nature’s INTELLECT ,,,,,with the EARTH iron core and its atomic number 26 English alphabet letters ….. considered the CORE of Nature’s INTELLECT system … again ..mirrored in the SYMBOL MACHINE word …. human cortex.

Thus Nature’s code word –> India –> subset codes –> In + dia –> Inner diameter (of EARTH communications LINKS)

Subconscious – Wikipedia, the free encyclopedia
Wikipedia
The subconscious mind stores information that the conscious mind may not immediately process with full understanding, but it stores the information for later retrieval when ”recalled” by the conscious mind, or by an astute psychoanalyst who can draw out information stored in the subconscious, bringing it to the …
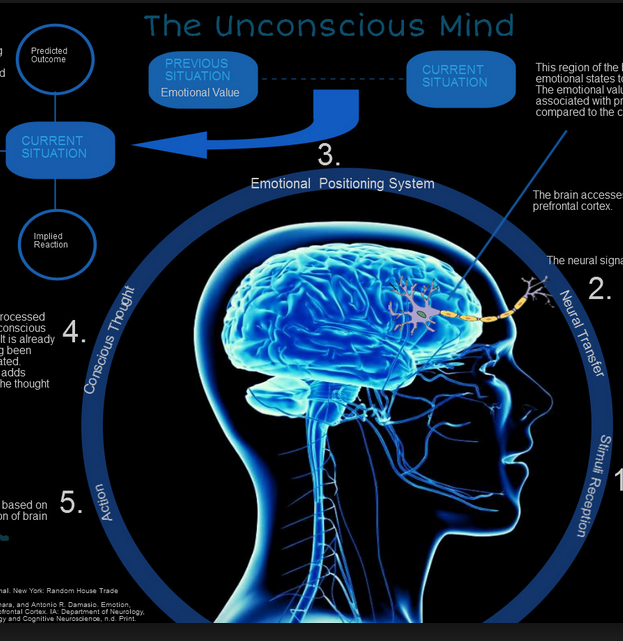

For this reason, all affirmations and statements must be positive. Do not say, “I will not gain weight.” The ‘not’ is not recorded. The subconscious mind ..
Your unconscious memory is virtually perfect. It is your conscious recall that is suspect. The function of your subconscious mind is to store and retrieve data. Its job is to ensure that you respond exactly the way you are programmed.
Thus the city of Calcutta INDIA has an influence on events in other cities on the EARTH geography surface.
The EARTH has mass and consequently weight …many tons of weight ..key word TON –> identifies city of –> bosTON,MASS …as having EARTH identifiers.
Calcutta –> Cal + cut + ta –> LINKS via word–> cut –> connect ……. connect the cuts in the fabric of EARTHLY space/time –>
Connect cuts .. interface with the cut of Calcutta–> code name –> Connecticut.
Connect cuts .. interface with the cut of Calcutta–> code name –> Connecticut.

The cut …….. tragic signaling EVENTS

Sandy Hook Elementary School shooting – Wikipedia, the …
The Sandy Hook Elementary School shooting occurred on December 14, 2012, in Newtown, Connecticut, when 20-year-old Adam Lanza fatally shot 20 children …

Boston Bombings – News, Pictures & Videos – CBS News
Complete coverage of the April 15, 2013 attack on the Boston Marathon, the investigation, and the trial of Dzhokhar Tsarnaev.
Let’s look at another blog post that provides more clues about the rigged BOSTON TRIAL of Tsarnaev in the
Department of Justice cover-up of the EM = Electromagnetic human life forms at EM = Embassies in Washington, DC
that used KHZ radio bandwidth
Department of Justice cover-up of the EM = Electromagnetic human life forms at EM = Embassies in Washington, DC
that used KHZ radio bandwidth
to manipulate the brain stem
of KH humanoid –>
of KH humanoid –>
dzhoKHar

500 kHz – Wikipedia, the free encyclopedia
Since early in the 20th century, the radio frequency of 500 kilohertz (500 kHz) has been
an international calling
and distress frequency for Morse code

Dzhokhar Tsarnaev, the Federal Communication Commission and EM = Embassies in Washigton, DC and their nasty
brain bio-radio manipulation and control schemes ……
that the subconscious MIND of dzhoKHar intercepted and acted in self-defense.

Another blog post that explains more.
ndian Embassy ……
electromagnetic coupling
and
Bose-Einstein
communication problems
result in many tragic DEATH events.
After the Science Wars | Issue 45 | Philosophy Now
https://philosophynow.org/issues/45/After_the_Science_Wars
The philosopher and historian of science Thomas Kuhn (1922-1996) famously challenged the notion that there is a sharp distinction between scientific theories ..
Let’s look at the science WAR casualties involving Indian brain engineering technology TRICKS and cover-ups in the United States of North America and elsewhere in the world.
a) the sin wave KHZ bandwidth battle in Oak Creek.
Wisconsin Sikh temple shooting – Wikipedia, the free …
https://en.wikipedia.org/wiki/Wisconsin_Sikh_temple_shooting
Wikipedia
On August 5, 2012, 40-year-old Wade Michael Page fatally shot six people and wounded four others at a Sikh temple in Oak Creek, Wisconsin. Page committed …
Wisconsin Sikh –> code si + kh –> sin wave KHZ
500 kHz – Wikipedia, the free encyclopedia
Wikipedia
Since early in the 20th century, the radio frequency of 500 kilohertz (500 kHz) has been an international calling and distress frequency for Morse code
.
international calling and distress frequency for Morse code
international calling and distress frequency for Morse code
international calling and distress frequency for Morse code ..from Milwaukee area ..
ignored by the Indian Embassy in Washingtom,DC and the entire Indian community ..including scientists.
ignored by the Indian Embassy in Washingtom,DC and the entire Indian community ..including scientists.
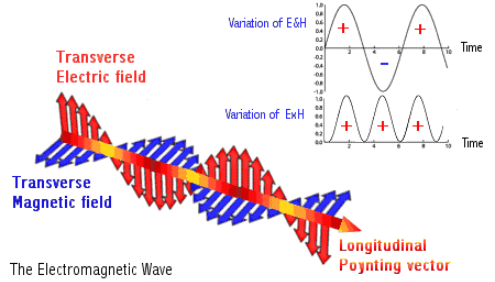
Thus the em –> electromagnetic spectrum and the em people in Washington, D. C.
Electromagnetic radiation – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Electromagnetic_radiation
Wikipedia
Electromagnetic radiation (EM radiation or EMR) is a form of radiant energy released by certain electromagnetic processes. Visible light is one type of …
Washington, DC Embassy Guide of EM life formats
(List of Foreign Embassies)
dc.about.com › … › Government, History, Facts and Information
Washington, DC boasts more than 175 foreign embassies, residences, chanceries, and diplomatic missions. An embassy is the official mission through which one country conducts their foreign affairs in another country. Many of the embassies in Washington, DC are housed in beautiful historic buildings, occupying former residential row houses or small mansions
Electromagnetic Spectrum – Introduction
Washington, DC Embassy Guide to EM thought waves
imagine.gsfc.nasa.gov/science/toolbox/emspectrum1.html
NASA
The electromagnetic (EM) spectrum is the range of all types of EM radiation. Radiation is energy that travels and spreads out as it goes – the visible light that …
Washington, DC Embassy Guide to EM thought waves using the
bio-optical system 370 EM computer
to create the light/optical WAR
resulting in the FLIGHT 370 brain errors creating the I/O input/output message from the I/O region .. Indian Ocean.
Malaysia Airlines Flight 370 – Wikipedia, the free encyclopedia
Wikipedia
Jump to <a href=”https://en.wikipedia.org/wiki/Malaysia_Airlines_Flight_370#Timeline_of_disappearance”>Timelineof <b>disappearance</b></a> – Main article: Timeline of Malaysia AirlinesFlight 370 …. area of the southern Indian Ocean, and that the aircraft is …
CBS News
Follow CBS News’ coverage of the disappearance of Malaysia Airlines Flight 370 … Island in the Indian Ocean is from Malaysia Airlines Flight 370 that vanished …
Missing Malaysia Airlines Flight 370 – The Weather Channel
The Weather Channel
Breaking: Confirmed Debris from Malaysia Airline Flight MH370 … The media reported a new aircraft part was discovered Sunday on the French … (MORE: What Indian Ocean Currents Tell Us About the Possible Debris). alt.
in other words .. Nature’s optical nerve systems used by humans are missing part of the REQUIRED database … frame of reference WORDS and CONCEPTS ……
Missing Malaysia ……. subset codes
Miss Mala –> Miss from Malarctic, Quebec, Canada and the Abbey High School in Toronto and the Far Horizons Resort on Longboat Key, Sarasota, Florida …… around year 1962..1963
Miss Mala –> Miss from Malarctic, Quebec, Canada and the Abbey High School in Toronto and the Far Horizons Resort on Longboat Key, Sarasota, Florida …… around year 1962..1963

Flight 370
F … light 370 … eye/retina/ iris … human
optical computer CONTROL PANEL ..


Next, we have the Indian embassy …… codes
……………………………….an em –> 2 important relationship codes.
……………………………….an em –> 2 important relationship codes.
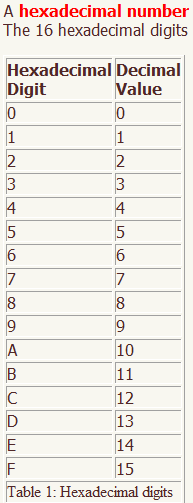
an em –> alpha/numeric Base 16 hexadecimal LINK to EM data field
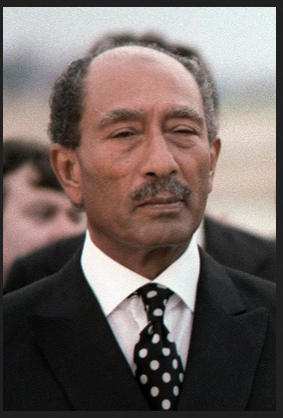
Assassination of Anwar Sadat – Wikipedia, the free …
https://en.wikipedia.org/wiki/Assassination_of_Anwar_Sadat
Wikipedia
The assassination of Anwar Sadat occurred on 6 October 1981. Anwar Sadat, the President of Egypt, was assassinated during the annual victory parade held in …
Assassination of Anwar Sadat
Assassination of Anwar Sadat
………..nation of An war
………..nation of Alpha/numeric war
the incomplete explanations about the assassinatioon promoted by the biased, arrogant thinkers in Waashington,DC
AND
………..nation of An war
………..nation of Atomic number war
Next, we have the Indian embassy …… codes
……………………………….an em
……………………………….an em
–> electromagnetic coupling constant 137
Coupling Constants for the Fundamental Forces
Coupling Constants for the ……… mental Forces
hyperphysics.phy-astr.gsu.edu/hbase/…/couple.h…
Georgia State University
In obtaining a coupling constant for the strong interaction, say in comparison to the … Using the electromagnetic coupling constant of 1/137 then leads to a …
The importance of the constant is that it measures the strength of theelectromagnetic interaction. It is precisely because the constant is so small (i.e. 1/137as …
This number is the value of the fine-structure constant (the actual value is one … For an electromagnetic black hole, general relativity comes to the rescue and …
The Mysterious 137
The Mysterious 137
The Mysterious 137 and FermiLAB director ….
Pier Oddone at 37 degrees Celsius
Pier Oddone at 37 degrees Celsius
…………. one 37
…………. 1 37
…………. one 37
…………. o=” oxygen” neutrons at temperature 37
…………. one 37
…………. one 37
…………. omaha ne … the quantum state of Nebraska and the atomic social science battle at the West Road Mall with humans at 37 Celsius
37 Celsius – Body temperature chart | F to C
http://www.ferinheighttocelsius.com/F-to-C/doc/37–celsius
Detailed chart for Celsius and Fahrenheit temperature values in the vicinity of 37degrees C. Useful for converting body temperature measurements.
Temperature of a Healthy Human (Body Temperature)
hypertextbook.com/facts/LenaWong.shtml
a human can maintain its ‘internal pond’ at a constant temperature of 37 °C”,
Westroads Mall shooting – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Westroads_Mall_shooting
Wikipedia
The Westroads Mall shooting was a mass shooting that occurred on Wednesday, December 5, 2007, at the Von Maur department store in the Westroads Mall in …
Police: Nine killed in shooting
at Omaha mall, including …
at Om
atOm ma
atOm map (for) hawking … at the West Road
University of Cambridge England Europe…
http://www.cnn.com/2007/US/12/05/mall.shooting/
CNN
A 19-year-old gunman who killed eight people and then himself Wednesday at the Westroads Mall in Omaha, Nebraska,
Welcome to Embassy of India, Washington D C, USA
https://www.indianembassy.org/
Embassy of India, Washington, D.C.
Information on the India’s democratic system, foreign and nuclear policy, and India-U.S. relations. Also hosts a general archive of policy statements.
Embassy of India, Washington D.C Embassy of India
2536 Massachusetts Avenue, NW,
Washington,DC 20008
2536 Massachusetts Avenue, NW,
Washington,DC 20008
…………………. Nature’s SYMBOL MACHINE existential physics orders
Embassy of India
Embassy of India
Em ………. f Ind …find / locate / identify / acknowledge existence of …
2536 Massachusetts Avenue, NW,
2536 Massachusetts Avenue, NW,
Mass …. atomic Massachusetts Avenue, NW,
Mass ………… Avenue / row / street /information rows of atomic table
Let’s look at India and the Bose-Einstein …
Bose-Einstein condensate (BEC) | physics | Britannica.com
http://www.britannica.com/…/Bose–Einstein–condensa…
Encyclopaedia Britannica
Bose–Einstein condensate (BEC), a state of matter in which separate atoms or … basis of the quantum formulations of the Indian physicist Satyendra Nath Bose.
Twenty Years Of Bose-Einstein Condensation – Forbes
http://www.forbes.com/…/twenty-years-of-bose–einstein–condensation/
Forbes
Twenty years ago today, the first Bose–Einstein Condensate in a … bosons, are named after the Indian physicist Satyendra Nath Bose, who sent …
The Bose-Einstein statistics WAR in Boston with citizen / Federal violations of the F(e) equation
RD-blog-number-6033 by Herb Zinser reviews the Bose-Einstein statistics TRIAL of the Boston Marathon runners that ran in year 2013 ….. they ran as bio-math random variable objects (in human format) to generate a statistical database for Nature’s social system engineers.

The above stand on 2-legs.
They are composed of atomic particles in human package format …. a rectagular BOX designed by B.F. Skin Skinner and the evolution of Skinner box technology and social manipulation shemes.
Google Books
Title, Modern Packaging Encyclopedia. Publisher, McGraw-Hill., 1966. Original from, the University of Virginia. Digitized, Jul 13, 2010. Export Citation, BiBTeX …
Using the above packaging information …. the evolution of
http://www.simplypsychology.org/operant-conditioning.htmlby BF Skinner – Related articlesAlthough, for obvious reasons he is more commonly known as B.F. Skinner. … Edward Thorndike studied learning in animals using a puzzle box to propose the …
to
B.F. S –> Batavia, FermiLAB atomic bio-physics skin scientists like Pier Oddone that study atomic with electron skins that MIRROR themselves

Above, EARTH LAB specimens …. BATCH of specimens at the Bat location –> Batavia ..seeking clues to their atomic INNER identity …. .
b.f. skinner ………
………inner / internal thoughts
b.f. skinner ………
………inner / internal thoughts
B.F. –> Before –> before code –> . sk –> sequence of shells subscript K

B.F. Skinner | Operant Conditioning at FermiLAB | Simply Psychologyby BF Skinner – Related articlesAlthough, for obvious reasons he is more commonly known as B.F. Skinner. … Edward Thorndike studied learning in an = atomic number entity …an = animals with 2-legs using a puzzle box to propose the …
to
B.F. S –> Batavia, FermiLAB skin scientists like Pier Oddone
to year 2013
B.F. S –> Boston Federal System with humans as atomic representatives .

Above –> Higgs boson SYMBOL LIFE transformation to physical biology messsengers in humanoid display FORMAT on Nature’s EARTH geography / land/ street/ .. display surface with people, concrete buildings, cellulose oak trees, retail department stores, etc
Wikipedia
In quantum statistics, Bose–Einstein statistics (or more colloquially B–E statistics) is one of
two possible ways in which a collection of non-interacting …
Concept – History – Two derivations of the Bose … – Interdisciplinary applicationsBoston Marathon bombing – Wikipedia, the free encyclopedia
Wikipedia
The Boston Marathon bombing was a terrorist attack, followed by subsequent related shootings,
that occurred
that occurred
when two pressure cooker bombs exploded ..
hyperphysics.phy-astr.gsu.edu/hbase/…/disbex.h…
Georgia State University
How many ways can you distribute 9 units of energy among 6 identical, indistinguishable bosons in Boston?
The three distributions of particles at left each have the same …
The three distributions of particles at left each have the same …
The three distributions of particles
The three distributions of particles
The three distributions of –> human particles
Daily MailApr 15, 2013 – The two bombs that inflicted horror at the Boston Marathon were made from …
Witnesses described seeing 3 humans and
their body parts flying through the air
creating a Bose-Einstein probability distribution They killed 3 people and injured an estimated 264 others.[2][4][9]They killed 3 people and injured an estimated 264 others.[2][4][9]They killed 3 people and injured an estimated 264 others.The Boston Marathon bombing was a terrorist attack, followed by subsequent related shootings, that occurred when two pressure cooker bombs exploded during the Boston Marathonon April 15, 2013. The bombs exploded about 12 seconds and 210 yards (190 m) apart at 2:49 pm EDT, near the marathon’s finish line on Boylston Street.
Witnesses described seeing 3 humans and
their body parts flying through the air
creating a Bose-Einstein probability distribution They killed 3 people and injured an estimated 264 others.[2][4][9]They killed 3 people and injured an estimated 264 others.[2][4][9]They killed 3 people and injured an estimated 264 others.The Boston Marathon bombing was a terrorist attack, followed by subsequent related shootings, that occurred when two pressure cooker bombs exploded during the Boston Marathonon April 15, 2013. The bombs exploded about 12 seconds and 210 yards (190 m) apart at 2:49 pm EDT, near the marathon’s finish line on Boylston Street.

The data generated in Boston has information pointer 264 –> 26 –> agrees with number 26 above ….
injured an estimated 264 others
injured an estimated 264 others
injured an estimated 26 …entities with 4 DNA nucleotides
Also, we had the Runway 26 particle distribution DEMO experiment at Lexington, Kentuck with Comair airlines. The Federal Aviation Administration system crash investigators keep track of air plane, body parts. and passenger luggage particle distributions.


Above, words ,,,,, the average population of each energy state ( atomic mass and the state of Mass … Massachusetts) must be takes.
Thus violations by the citizen population of Massachusettes created the conditions that resulted in the Boston tragic signaling EVENT.
The atomic relationship of 6 and 9 ….. was discovered by a scientist using his home bio-physics LAB using lab secimens he keeps at home.he conditions that resulted in the Boston tragic signaling EVENT.Sixty-nine or 69, also known by its French name soixante-neuf (69), is a group ofsex positions in which two people align themselves so that each person’s mouth is near the other’s genitals, simultaneously performing oral sex.[1][2][3] The participants are thus mutually inverted like the numerals 6 and 9 in the number 69, hence the name.[3][4] This position can involve any combination of genders. Although not displayed in any of the images, a 69 can also be performed with both partners on their sides, perhaps a more relaxed position.


The above scientific reseach experiment has evolved over the years …and plays a major role in all systems


Above, the F(e) equation that F(e) = Federal law officials omitted from
the rigged mathematical-physics social science TRIAL of Tsarnaev.
the rigged mathematical-physics social science TRIAL of Tsarnaev.
In addtion, theory and data …..

The applications … parallel processing result

Below, agent code –> Palencia –> subset identifier code –> CIA ….. messages for Carmen Ortiz


The atomic gases DEMO in Boston used the information string to –>
http://www.chm.davidson.edu/…/GasLaws/BoylesLawCalc.ht…
Davidson College
Boyle’s Law states that the product of the pressure and volume for a gas is a constant for a fixed amount of gas at a fixed temperature. Written in mathematical …

Thus we see the ENERGY trial ..Nature VERSUS the citizen /federal government INTELLECTUAL arragance and supremacy …. that has resulted in many errors of ommisision and deliberate tampering of electron volts(ev) data –> ev –> evidence tampering OR lack of understanding by the Department of Justice omniscent thinkers ….. thinking of restaurant menus, sports, and appeasing the nonsense citizen brains of BOSTON with the circus TRIAL.

U.S. Attorney Carmen Ortiz speaks to the news media with Boston Police Commisioner William B. Evans after the sentencing of Boston Marathon bomber Dzhokar Tsarnaev

Thus we have the Department of Justice bragging CLAIMS of superiorty over all the laws of existence …
with agent equation control code –>
Carmen – ->
en –> energy District Attorney
atomic SYMBOL LIFE is claimed by –> Evans ….. Boston atomic police …William Evans … claim control over all atomic nucleus expression systems per MIT book.
In year 2015, MIT univeristy continues to approve of this outrageous bragging claim.
MIT claims their engineering software control Nature’s brain cell Mitochondria subset letter codes –> Mit + Oc + cho + nd
MIT ERRORS ….. resulting the oc murders (Oklahoma City and Oak Creek, Wisconsin), Mr. cho shooting at Virginia TECH, Northern DeKlab shooting, etc.
Thus MIT and Boston have serious awareness and perception problems .. regarding an understanding of REALITY and human events that occur ……
versus Hollywood style REEL ..REAL …reality
versus Hollywood style REEL ..REAL …reality

photonics.phys.strath.ac.uk/…/MateuszZawadzk…
University of Strathclyde
A brief overview of the statistical and quantum mechanics used to describe the … 2.2 Bose-Einstein statistics . ….. D.1 Hot on the trail of the BEC fluctuation .

Pluralism Project
In the 1970s, new Indian immigrants, most of them professionals, began to have … Nearly twenty years later, in July of 2009, the Hindu community celebrated the …
bostonsikhsangat.com/
In remembrance of the Shaheedi Purab of Guru Arjan Dev ji and with the blessings of Almighty and Sadh Sangat, Gurdwara Sikh Sangat Boston is organizing a …
Wikipedia
Jump to Boston Marathon bombings – [edit]. Main article: Boston Marathon bombings. Tsarnaev was convicted of participating in the Boston Marathon ..
Carmen Ortiz issues DEATH SENTENCE to siKH Temple VIA the intermediate value theorem of Calcutta calculus bo-math agent ..bio-math derivative dz –> Dzhokhar..Department of Justice brags about their sucessful murder set-up scheme of teh SiKH Temple in Oak Creek, Wisconsin ..now the continued attack on KHZ via the DEATH SENTECE
to DzhoKHar and the consequence of that is the BRAIN death sentence to……………Har –> Harvard University .
to DzhoKHar and the consequence of that is the BRAIN death sentence to……………Har –> Harvard University .

The Huffington Post
Dzhokhar Tsarnaev was sentenced to death Friday for his role in the 2013 Boston Marathon bombing. A jury deliberated for more than 14 hours over th.
CNN
Aug 5, 2012 – At least seven people, including a gunman shot by a police officer, have been killed in an attack at a Sikh temple near Milwaukee.

Thus the Departemnt of Justice attack upon the knowledge base of Bose-Einsteins statistics and related groups of people (by heritage or name identifiers) …..

Let’s look at the Boston equation again………..

Wikipedia
Isaac Asimov (/ˈaɪzɨk ˈæzɨmɒv/; born Isaak Yudovich Ozimov; circa … of biochemistry at Boston University, best known for his works of science fiction and for …
Foundation series – Robot series – Three Laws of Robotics – NightfallPsychohistory (theoryl) – Wikipedia, the free encyclopedia
Wikipedia
Psychohistory is a theoretical science in Isaac Asimov’s Foundation universe which …
sociology, and
to make general predictions about the future … the psychohistorical equations showing the future development of humanity. …. a group of AIs predict that human society (and therefore the global network …
Wikipedia
Hari Seldon is a character in Isaac Asimov’s Foundation series. In his capacity as mathematics professor at Streeling University on Trantor, Seldon … up to his last moments on psychohistorical equations; his activated Prime Radiant … right time and place to set up a new society, one that would replace the collapsing …
In his capacity as mathematics professor at Streeling University
In his capacity as mathematics professor at Streeling University
In his capacity as mathematics professor at Streeling University
In his capacity as mathematics professor at Stree University
In his capacity as mathematics professor at Street –> Boylston Street


his activated Prime Radiant … right time and place to set up
his activated Prime Radiant … right time and place to set up
his activated Prime Radiant
… right time and place to set up
Psychohistory is a theoretical science in Isaac Asimov’s Foundation universe which …
sociology, and mathematical statistics
to make general predictions about the future .

String theory – Wikipedia,
In physics, string theory is a theoretical framework in which the point-like particles … limiting cases of a single theory in eleven dimensions known as M-theory. …… conditions similar to those present at around 10-11 seconds after the Big Bang.
In physics, string theory is a theoretical framework in which the point-like particles … limiting cases of a single theory in eleven dimensions known as M-theory. …… conditions similar to those present at around 10-11 seconds after the Big Bang.
The eleven dimensions …… .each dimecsion has expressions that may or may not be obvious.Applications of Nature’s SYMBOL MACHINE equation ..gives the possiblities
f (E) –> atomic human F(Evans) ….. William Evans composed of atomic elements as outlined by the MIT 1955 book by Robley Evans.
f(E) –> a component of identifier word–> Female.
The high ranking Bose-Eistein female in Boston –> Female –> Carmen Ortiz
f(E) –> Federal goverment –-> equation pointer to Office of Science, the Department of Energy, and FermILAB …… all who .. deliberatly suppressed
ev (electron volt expression systems )
ev = evidence related to tsaRNAev
ev (electron volt expression systems )
ev = evidence related to tsaRNAev
the Boylston Street intersection of statistical mechanics and algorithms,
in particular understanding and developing new algorithms …
in particular understanding and developing new algorithms …
Statistical Mechanics: Algorithms and Computations – École …Statistical Mechanics: Algorithms and Computations from École normale supérieure. In this course you will learn a whole lot of modern physics (classical and …

This article is about the former U.S. Vice President for social engineering and brain engineering sortware algorithms to maniplaute and control math and scicne students for the string theory special application –> puppet string theory that claimed the life of SAM HENGEL at Marionette Theater High Scool in Marinette Wisconsin.


Judge Gives Rules at Start of Boston Marathon Bombing Trial
“Mr. Tsarnaev is accused of crimes that are potentially punishable by a sentence of death,” Judge
George A. O’Toole Jr. (tool/ puppet / manipulated)
of Federal District Court said in introducing the defendant to potential jurors.
puppet. 1. A person not capable of forming his or her own ideas. Often, the person … 2. A person being manipulated, whether he he realizes it or not.See: tool –> see Boston tool judical system.
Pawn – definition of pawn by The Free Dictionary2. someone who is used or manipulated to further another person’s purposes (the community sub-consicous MIND BS purposes and news reporter arrogance purposes) . ….
noun
tool, instrument, toy, creature, puppet, dupe, stooge (slang), plaything, …
noun
tool, instrument, toy, creature, puppet, dupe, stooge (slang), plaything, …
BES Poster Award
26 Mar 2013
Congratulations to Dr Vicky Cabrera-Sharp who won a ‘Highly commended’ poster award (from almost 400 considered) at the Annual Society for Endocrinology Conference last week. Her poster was entitled ‘BMP4 induces terminal differentiation of primary trophoblast cells and increases chorionic gonadotrophin secretion’.
…in other words–> Boston BES = Bose-Einstein Statistcs
at the Annual Society for Endocrinology Conference …
………………………………..Endocrin poetry rhymes
………………………………..Endocrin poetry rhymes
learni.st/users/amelia…/33366-political–indoctrination-in-public-schools
Political indoctrination is a problem in public schools. The fact that these incidents did not inspire public concern (let alone outrage) shows how complacent our … .
RVC have “Highly Accessed” article in BMC Neuroscience
………………………..euro
dollar finacial code ..secret message systems
………………………..euro
dollar finacial code ..secret message systems
04 October 2012
A recent article by the RVC has been categorised as “highly accessed” by BioMed Central. This means that it has been identified as an article that has been especially highly accessed, relative to its age, and the journal in which it was published.
24 September 2012
Julian Drewe, Postdoctoral Research Fellow at the RVC, has been awarded funding from the Food and Environment Research Agency (FERA) to work on “field approaches to identifying Mycobacterium bovis infection in badger populations”. Further information about the project is available here.
…in other words ..
Einstein;s data processing DATA FIELD ….
Field approaches to identifying Mycobacterium bovis infection in Wisconsin citizen brain SYMBOL PROCESSORs …the Badger state populations of bull-stories and INTELLECTUAL political science dribble
24 September 2012
Julian Drewe, Postdoctoral Research Fellow at the RVC, has been awarded funding from the Food and Environment Research Agency (FERA) to work on “field approaches to identifying Mycobacterium bovis infection in badger populations”.
Further information about the project is available here.
Further information about the project is available here.
Further information
……heroin format of word command input to the brain processor
Thus we see the rigged trial in Boston and the omission of large amounts of important evidence ignored in the Department of Justice CONSTITUTIONAL violations of integrity and fairness …and giving the American public (like myself) the data, the factors and underlying reality involved in the signaling EVENT..

Another blog post explains the Wisconsin / Michigan border ……. another border / boundary situation …. like the India (na)/ Ohio situation.
RD-blog-number-6180 by Herb Zinser look at Nature’s EARTH LANGUAGE sin wave description of the state of Wisconsin.

Thus the EARTH mathematical-physics geography surface …… a platform upon which human life and human activities exist upon.
Word equation –> Wisconsin earth …
……………………………………..sine wave
……………………………………..sin ear …… the Wisconsin ear can listen to sin wave thoughts
……………………………………..sine wave
……………………………………..sin ear …… the Wisconsin ear can listen to sin wave thoughts



Below, Border Junction .. the interface boundary between 2 different EARTH surface LAND expression media/ formats at IRON MOUNTAIN for the EARTH internal iron core …. output messages of the 26 atomic English alphabet letters of the ferrous oxide IRON atom SYMBOL processing ENGINES.
–> land of Wisconsin
………………………….sin wave oscillations with OS = OScillascope of OShkosh
………………………….sin wave oscillations with OS = OScillascope of OShkosh
Oshkosh, Wisconsin – Wikipedia, the free encyclopedia
Os….os……………..sin – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Oshkosh,_Wisconsin
Wikipedia
Oshkosh is a city in Winnebago County, Wisconsin, United States, located where the Fox River enters Lake Winnebago from the west. The population was …
 The boundary of the sin wave region (Wisconsin) is with
The boundary of the sin wave region (Wisconsin) is withthe atomic region………..
………..mic
………..michigan …… upper Michigan ………… thus the intercation codes ….
upper michigan ..the upper/positive side of the sine wave interacts with the atom

Earth sin wave geography regions are well-known …. as are ………. the HUMAN GROUP sine wave wars
 Notice the sin wave shape of the SINAI Peninsula … it look like the negative half of a sin wave ….. possibly explaining the conflicts ………….. negative human behavior of that mathematical-physics geography surface region.
Notice the sin wave shape of the SINAI Peninsula … it look like the negative half of a sin wave ….. possibly explaining the conflicts ………….. negative human behavior of that mathematical-physics geography surface region.The ‘Great War’ of Sinai: How to Lose a ‘War on Terror …
http://www.foreignpolicyjournal.com/…/the-great-war-of-sinai-how-to-lose-a-…
The Sinai Peninsula has moved from the margins of Egyptian body … pushing it further into a deadly course of a war that can only be won by …
Six-Day War – Wikipedia, the free encyclopedia
Wikipedia
Jump to <a href=”https://en.wikipedia.org/wiki/Six-Day_War#Gaza_Strip_and_Sinai_Peninsula”>Gaza Strip and <b>Sinai Peninsula</b></a> – Conquest of Sinai. June 5–6, 1967. People in a bomb shelter at Kfar Maimon. The Egyptian forces consisted of …
Seeking a solution for Egypt’s troubled Sinai Peninsula – Al …
Al Jazeera
Apr 13, 2015 – War & Conflict. Seeking a solution for Egypt’s troubled Sinai Peninsula … fighters who came for the experience and the politics of the war.
Sinai Peninsula ….. SIN WAVE math and bio-math War Grows – Business Insider
http://www.businessinsider.com/sinai–peninsula–war-grows-20…
Business Insider
An Eccentric But Dangerous Conflict In The Sinai Peninsula Is … is the scene of a murderous, often eccentric, but dangerous war that is spilling …
Nikola Tesla’s Earthquake Machine – The Excluded Middle
http://www.excludedmiddle.com/earthquake.htm
In the last years of the 19th century, technological alchemist Nikola Tesla may …
A vibration sent through the earth returns an “echo signature” using the same …
A vibration sent through the earth returns an “echo signature” using the same …
A vibration sent through the earth returns
A vibration sent through the earth returns
A vibration sent through the earth returns
A vibration sent through the earth returns
Egypt’s War in the Nikola Tesla EARTH vibrationd ….. Sinai Peninsula: A Struggle that Goes …
Egypt is in the midst of a war that can be categorized as a low-intensity conflict. This category represents a common pattern of military …
Thus we look at
Wisconsin and Michigan BORDER … of IRON MOUNTAIN region
………….sin ……mic IRON
………….sin atomic IRON ..ferrous oxide IRON atom MILITARY actions
Wisconsin and Michigan BORDER … of IRON MOUNTAIN region
………….sin ……mic IRON
………….sin atomic IRON ..ferrous oxide IRON atom MILITARY actions


Electrons In The Shells
Take a look at the picture below. Each of those colored balls is an electron. In an atom, the electrons spin around the center, also called the nucleus. The electrons like to be in separate shells/orbitals. As you learn more about atomic structure, you will learn that the electrons don’t stay in defined areas around the nucleus. They are found in cloudsthat can have different shapes that include spheres and dumbbell-like shapes. So remember when you look at our breakdown that the electrons aren’t always in a nice neat order as shown here.

Norway, Michigan – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Norway,_Michigan
Wikipedia
Norway is a city in Dickinson County in the U.S. state of Michigan. The population was 2,845 at the 2010 census. It is part of the Iron Mountain, MI–WI …

 Iron Mountain and nearby Norway …………… upper Michigan
Iron Mountain and nearby Norway …………… upper Michigan

The Wisconsin north deaths at Rice Lake matrices and Marinette High school, Wisconsin
………………..sin no de –> sine wave node …… the death NODE ..transfer to Europe
………………..sin no de –> sine wave node …… the death NODE ..transfer to Europe

super-symmetry existential MIRRORS ……..
gives EARTH geo-physics and human activity …… parallel processing region LINKED
by string theory to rope theory
by string theory to rope theory
Norway and Demark Europe
No……………..de……………rope …………… Node of rope …… and the string theory death NODE from Wisconsin /atomic borders .. represented by Michigan
No……………..de……………rope …………… Node of rope …… and the string theory death NODE from Wisconsin /atomic borders .. represented by Michigan

Above, we have the SYMBOL MACHINE and the EARTH LANGUAGE code word identifiers
…Norway and Demark ……….. algebra subset codes
…No…………….De — Node
…………………………………death Oscillation …. applications at
…………………………………………..OS = Oslo, Norway and Utoya, Norway
…No…………….De — Node
…………………………………death Oscillation …. applications at
…………………………………………..OS = Oslo, Norway and Utoya, Norway
2011 Norway attacks – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/2011_Norway_attacks
Wikipedia
Jump to <a href=”https://en.wikipedia.org/wiki/2011_Norway_attacks#Oslo_bombing”><b>Oslo bombing</b></a> – [edit]. Main article: Timeline of the 2011 Norway attacks § 22 July 2011. A graphic that illustrates the placement of the car bomb in …
The 2011 Norway attacks were two sequential lone wolf terrorist attacks by Anders Behring Breivik against the government, the civilian population, and a Workers’ Youth League (AUF)-run summer camp in Norway on 22 July 2011. The attacks claimed a total of 77 lives.
Oslo bombing
The first attack was a car bomb explosion in Oslo within Regjeringskvartalet, the executive government quarter of Norway, at 15:25:22 (CEST).[1] The bomb was made from a mixture of fertiliser and fuel oil[13][14] and placed in the back of a van.[15] The van was placed in front of the office block housing the office of Prime MinisterJens Stoltenberg and other government buildings.[16] The explosion killed eight people and injured at least 209 people, twelve of them seriously.[10][11][12]
Utøya EARTH mass/ atomic mass ordered –>massacre
The second attack occurred less than two hours later at a summer camp on the island ofUtøya in Tyrifjorden, Buskerud. The camp was organized by the AUF, the youth division of the ruling Norwegian Labour Party (AP). A gunman dressed in a homemade police uniform and showing false identification[17][18] gained access to the island and subsequently opened fire at the participants, killing 69 of them,[7][8] and injuring at least 110 people, 55 of them seriously;[11][12] the 69th victim died in a hospital two days after the massacre.[9]Among the dead were personal friends of Prime Minister Jens Stoltenberg and the stepbrother of Norway’s crown princess Mette-Marit
Let’s look an outline of the possible mechanics involved in the super-symmetry information MIRROR and its translation into a physical reality … DISPLAY …. the tragic signaling EVENT in NORWAY Europe
…………………..rope …. and the denial of rope theory existence by scientists is a denial of the existence of earth geography region known as EUROPE and a denial of the existence of European humanoids.
Nature’s SYMBOL MACHINE is comprised of nouns, verbs, concepts, math equations, flowcharts, etc. The ideas found in math and science textbooks are part of the SYMBOL MACHINE.
Using Galileo’s suggestions of ” 2 CHIEF WORLD SYSTEMS” we now perceive Sartre existentialism as partitioned into 2 or more data spaces……. the 2 CHIEF existential entities
1) physical reality of objects: concrete highways, iron automobiles, cellulose trees, humanoids, atoms, molecules, gravity fields, EARTH iron core, etc.
2) The world of symbols, concepts, process control system flowcharts, biochemistry diagrams, math and physics equations, etc.
2) The world of symbols, concepts, process control system flowcharts, biochemistry diagrams, math and physics equations, etc.
Maps and Territories – Rijnlandmodel
Language in Thought and Action, S.I. Hayakawa.
Chapter 2 Symbols Maps and Territories
There is a sense in which we all live in two worlds.
Chapter 2 Symbols Maps and Territories
There is a sense in which we all live in two worlds.
Thus we have the source domain of SYMBOL LIFE and thought that may get a mathematical-physics mapping to the destination range of physical biology with human proper nouns, human activities, etc on the geography surface of EARTH.

Thus we see the possible EARTH system architecture and the iron 26 alphabet letters and their English language thoughts.
First. we have the source domain as the EARTH iron core …and using the North pole magnetic field FLOW LINES we have the communications mapping to the destination of the EARTH surface …………
that being IRON MOUNTAIN and Norway, Michigan by Wisconsin …..
that being IRON MOUNTAIN and Norway, Michigan by Wisconsin …..
thus EARTH surface MAP ….. descriptive of the setting for the physics MODEL … the
quantum sin wave & atomic MASS models and equation used by scientists..
quantum sin wave & atomic MASS models and equation used by scientists..
Now, Nature’s systems …2nd mapping ……. the mathematical-physical information & MILITARY command mapping occurs.
The source domain is the IRON MOUNTAIN and Norway region …..with Wisconsin string theory. The mapping destination is Norway,Europe (rope theory .. a FAT rope is comprised of strings ….. go to a hardware store for examples of a polyester or nylon rope).
Thus …..
Norway, Wisconsin ———-> Norway, Europe
Os – Oscillations of OshKOSH –> Oslo
Iron Mountain atomic number(an) 26 –> atomic, bio-physics human interceptor for code –> an –> Anders Behring Breivik and his IRON hemoglobin proteins
The bombing in Oslo Norway created EARTH vibrations.
Thus we have ………..
Nikola Tesla’s Earthquake Machine – The Excluded Middle
http://www.excludedmiddle.com/earthquake.htm
In the last years of the 19th century, technological alchemist Nikola Tesla may … Avibration sent through the earth returns an “echo signature” using the same …
“echo signature”
“echo signature”
“echo signature” —> VIA Earth surface location

Code word–> Czechoslovakia ….
……………………….echo …….kia –> the KIA iron vehicle .. interface message delivery device with EARTH iron core assigned LINKAGE word identifier …. proper noun KIA
……………………….echo …….kia –> the KIA iron vehicle .. interface message delivery device with EARTH iron core assigned LINKAGE word identifier …. proper noun KIA

Kia Motors – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Kia_Motors
Wikipedia
According to Kia Motors, the name “Kia” derives from the Sino-Korean words ki (“to come out”) and a (which stands for Asia), it is roughly translated as “arise or …
According to Kia Motors, the name “Kia” derives from the Sino-Korean words
Thus Kia Motors …… implies
Sino-Korean motors implies
Sin –> sine wave energy motors AS PREDICTED by Nikola Tesla
In addition to the above, other factors may play a roles.
We know the EARTH geography surface is comprised of atoms.
Thus a humanoid ..walking down a street ….. is walking upon an EARTH surface …. an atomic platform with its quantum waves, electrons, protons and neutrons.

RD-blog-number-6138 by Herb Zinser reviews the Nature’s ordered oscillation .. wave attack upon OSLO, Norway ….. using the Nikola Tesla EARTH vibrations.

Near Iron Mountain. Michigan is Norway, Michigan
.. both near the Wisconsin sin wave border.

Wisconsin …..
………..sin wave ..oscillation /vibration identifier code
Below, the EARTH systems architecture …. applications theory suggests that IRON MOUNTAIN OR an iron office building
…. would represent the existential physics buildings in the Tesla diagram


Wisconsin …..
………..sin wave ..oscillation /vibration identifier code
Below, the EARTH systems architecture …. applications theory suggests that IRON MOUNTAIN OR an iron office building
…. would represent the existential physics buildings in the Tesla diagram

Nikola Tesla’s Earthquake Machine – The Excluded Middle
http://www.excludedmiddle.com/earthquake.htmIn the last years of the 19th century, technological alchemist Nikola Tesla may … A vibration sent through the earth returns an “echo signature” using the same ..

Nikola Tesla – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Nikola_Tesla
WikipediaFor other uses, see Nikola Tesla (disambiguation) and Tesla. …. In 1870, Tesla moved to Karlovac, to attend school at the Higher Real Gymnasium, ….. “Tesla claims that in a few weeks he could set the earth’s crust into such a state of vibration …Coronary thrombosis – Wardenclyffe Tower – Alternating current – Tesla coil
into such a state of vibration .into such a state of vibration .into such a state of vibration / oscillation .. the state/country of Norway, Europe and the OSLO oscillation …created by a bomb.
Timeline: How Norway’s terror attacks unfolded – BBC News
http://www.bbc.com/…/world-europe-142602…;British Broadcasting Corporation… blast shook the centre of Oslo at 15:26 (13:26 GMT) on Friday 22 July 2011, …
Police confirmed the next day that the Nikla Tesla ECHO signature device …… was caused by a car bomb, and that
Police confirmed the next day that the Nikla Tesla ECHO signature device …… was caused by a car bomb, and that
Oslo bomb location on Google Maps Street View
http://www.streetviewfun.com/…/oslo–bomb–location-on-google-maps-street-vi…Jul 22, 2011 – Todays major explosion in Oslo, Norway took place in or near this building where prime minister Jens Stoltenberg was working. According to …
Thus we have the
Norway Wisconsin
…………………..sin / oscillation wave attack
Norway Wisconsin
…………………..sin / oscillation wave attack
at OS = Oscillation capital of Europe (OS = Oslo)………………………………………….rope theory /string theory


with the geography site NODE region ( No + De –> Norway Denmark)


String Theory and Vibrations – For Dummies
http://www.dummies.com/how-to/content/string-theory-and-vibrations.htmlThe center of the rope is the antinode,
where the displacement is the greatest
where the displacement is the greatest
and where another child will attempt to jump in. This is vibration at the fundamental …
..in other words ….. World War 2 ..1939 thru 1945 …
The center of the (Eu)rope is the antinode,
where the displacement (of people and refugees) is the greatest
Thus the node –> Node …….. expression
…………………………No death
…………………………Norway death
Other examples of EARTH death sites
Thus the node –> Node …….. expression
…………………………No death…………………………Northern DeKalb
where the displacement (of people and refugees) is the greatest
Thus the node –> Node …….. expression
…………………………No death
…………………………Norway death
Other examples of EARTH death sites
Thus the node –> Node …….. expression
…………………………No death…………………………Northern DeKalb
Northern Illinois University shooting – Wikipedia, the free …
https://en.wikipedia.org/…/Northern_Illinois_University_shoot…WikipediaThe Northern Illinois University shooting was a school shooting that took place on February 14, 2008. Steven Kazmierczak shot multiple people on the campus …of Northern Illinois University in DeKalb, Illinois, killing five people and injuring another twenty-one, before committing suicide.Shooting – Victims – Perpetrator – Reaction


The Evans field house IRON-56 message of year 1956 LINKS to the iron mass 55.85 … ,book published in year 1955.

Thus we see the EARTH iron core and its atomic number 26 English alphabet letters
and
the NORTH POLE magnetic field INTELLECTUAL SYSTEM …..
coordinated the scheduling of building construction, publications, etc. by humanoid iron hemoglobin protein devices.


Evans Field House – Wikipedia, the free encyclopedia
https://en.wikipedia.org/wiki/Chick_Evans_Field_House
WikipediaThe Evans Field House is a 6,000-seat multi-purpose arena in DeKalb, Illinois, USA. The EARTH site of IRON-56 Isotope expressions …. arena opened in 1956 and was the iron-56 home message site … to the Northern Illinois ..
The Evans field house IRON-56 message of year 1956 LINKS to the iron mass 55.85 … ,book published in year 1955.
The atomic nucleus. Robley Evans. McGraw Hill Book …
onlinelibrary.wiley.com › … › Vol 2 Issue 3John Wiley & Sonsby W Rall – 1956Jun 17, 2004 – The atomic nucleus. Robley Evans. McGraw Hill Book Company, Inc., New York (1955).
972 pp., $14.50. Waldo Rall. Article first published …
972 pp., $14.50. Waldo Rall. Article first published …

Thus we see the EARTH iron core and its atomic number 26 English alphabet letters
and
the NORTH POLE magnetic field INTELLECTUAL SYSTEM …..
coordinated the scheduling of building construction, publications, etc. by humanoid iron hemoglobin protein devices.


Thus we see .. that IRON MOUTAIN with atomic …..
…..michigan … and the border with
…..michigan … and the border with
Wisconsin
………..sin wave …… the concepts of –> atomic and sin waves
is identical to the concept signals from the DeKalb Illinois EVENT
..the EVANS Field house is an information pointer to the atomic nucleus database BOOKand the COLE Hall shooting was in an oceangraphy class –> ocean implies waves –> waves simply sin waves
and high school PSSC physics and the ripple tanks/ wave tank experiments and the homework assignments to figure out the equations from the data gathered in the water tank waves.
………..sin wave …… the concepts of –> atomic and sin waves
is identical to the concept signals from the DeKalb Illinois EVENT
..the EVANS Field house is an information pointer to the atomic nucleus database BOOKand the COLE Hall shooting was in an oceangraphy class –> ocean implies waves –> waves simply sin waves
and high school PSSC physics and the ripple tanks/ wave tank experiments and the homework assignments to figure out the equations from the data gathered in the water tank waves.
Thus the node –> Node …….. expression
…………………………No death
…………………………No death
…………………………Norris death
Norris Hall | Virginia Tech | Virginia Tech
https://www.vt.edu/about/buildings/norris–hall.htmlVirginia TechNorris Hall contains offices and laboratories for the Department of of Engineering Science and Mechanics… the site of 30 faculty and studentdeaths at the hands of a student gunman on April 16, 2007.
No comments:
Post a Comment